就在这几天国内还在为萝卜快跑的“销量暴涨”的时候,在大洋彼岸的特斯拉,又在酝酿新动作了。
特斯拉车主们近期已经开始接收到FSD V 12.4.3版本的更新,然而,这一版本的推出并未完全解决之前FSD V12版本遗留的问题。据一位长期测试FSD Beta的特斯拉车主Omar反馈到,FSD 12.4.3在高速公路上仍会出现车道内反复震荡的“画龙”现象,这引发了车主们的不满和关注。
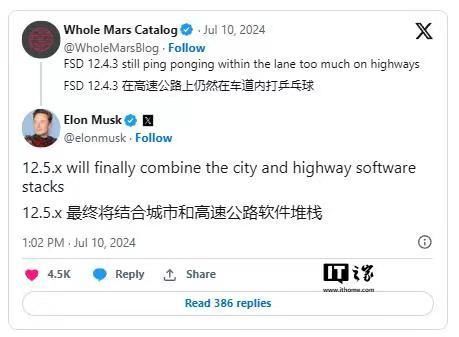
不过,面对这一反馈,特斯拉首席执行官埃隆·马斯克迅速回应,并透露了即将推出的FSD V12.5版本的重大更新计划。马斯克明确表示,FSD V12.5将最终整合城市和高速公路的自动驾驶软件堆栈,这一举措旨在提供更加流畅和稳定的驾驶体验。那么这个全新的FSD V12.5,究竟能带来怎样的体验呢?
从“单线程”走向“多合一”,FSD V12.5怎么做?
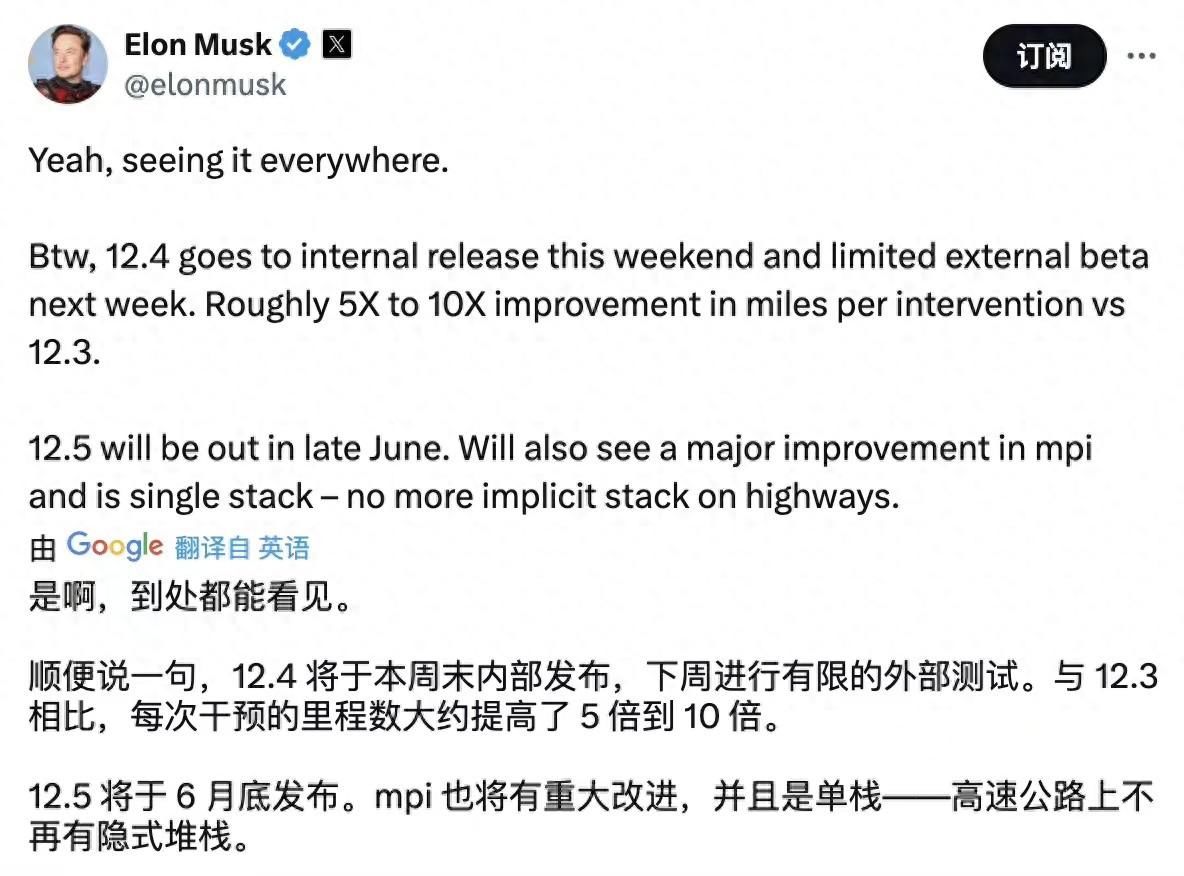
早在今年5月初,马斯克就曾预告FSD V12.5版本将于6月底发布,并承诺将带来MPI(每次干预行驶的英里数)方面的重大改进。目前,FSD V12一直采用多堆栈配置,包括针对城市街道的端到端堆栈和延续自V11版本的旧高速公路堆栈。所谓多堆栈,通常指的是一个系统中存在多个独立运作但相互关联的软件或算法模块,这些模块分别负责处理自动驾驶过程中的不同方面或阶段。特斯拉FSD系统的早期版本中,多堆栈架构是一种常见的设计方式。
具体来说,特斯拉FSD的多堆栈架构可能包括以下几个方面的模块:
1.高速公路堆栈:专注于高速公路上的自动驾驶功能,如保持车道、自动变道、调节车速等。它通常基于特斯拉传统的Autopilot软件堆栈进行开发,并针对高速公路的特定驾驶场景进行了优化。

2.城市街道堆栈:与高速公路堆栈相对应,城市街道堆栈则负责处理城市复杂环境中的自动驾驶任务,如识别交通信号灯、避让行人、应对突发情况等。这一堆栈可能采用了更为先进的算法和传感器融合技术,以应对城市驾驶中更高的复杂性和不确定性。
3.其他特定场景堆栈:除了高速公路和城市街道外,特斯拉FSD还可能为其他特定场景(如停车场、施工区域等)设计了专门的堆栈。这些堆栈可能包含了针对这些场景的特殊算法和逻辑,以确保自动驾驶系统在这些特殊环境中的安全性和可靠性。

马斯克确认,FSD V12.5将实现城市和高速公路软件堆栈的合并,形成一个单堆栈,以此来消除了隐式高速公路堆栈的存在。
还有一点,特斯拉的FSD系统严重依赖于地图信息来规划路线和车道变化。然而,在以往版本中,当车辆遇到未预见的障碍时,它们无法将这一情况实时反馈给车队中的其他车辆。但FSD V12.5将解决这一问题,它将允许车辆实时共享道路封闭、障碍物等信息,从而加速整个车队的适应和学习过程,使FSD系统能够随着数据积累而不断优化。虽然这一变化可能导致初期在高速公路上出现一些驾驶体验感的倒退,但预计最终将带来更流畅、更优质的自动驾驶体验。除此之外,马斯克多次提及的“智能召唤”功能也有望随着FSD 12.5的发布而进一步完善。
据悉,新的基于视觉的召唤功能将为仅配备视觉传感器的特斯拉汽车带来前所未有的便利性,预计这一功能将类似于自动泊车功能,为车主提供极大的便利。

此外,由于新的召唤功能与Autopilot的倒车功能紧密相关,它们可能会在同一版本中发布,或者根据开发进度有所调整。 值得注意的是,马斯克还曾确认尚未搭载自动驾驶辅助系统的特斯拉Cybertruck将在收到FSD V12.5更新后获得FSD功能。尽管在最近的帖子中他未再重申这一点,但这一信息仍然引起了业界和消费者的广泛关注。
用九年进化,FSD从依赖走向自主
特斯拉自动驾驶软件的发展历程可谓波澜壮阔。对于广大公众,尤其是缺乏软件或技术背景的特斯拉车主而言,"单栈"这一术语在Autopilot/FSD的语境中可能显得颇为晦涩难懂。基于我近九年来深入报道特斯拉Autopilot发展历程的经验,让我们一同揭开这一现象的神秘面纱。特斯拉的自动驾驶技术演进之路,是一条从依赖外部解决方案到自主创新的转变之旅。
起初,大约九至十年前,特斯拉借助Mobileye的软件来驱动其自动驾驶功能。然而,随着技术的深入探索,特斯拉决定自主研发自动驾驶软件,并相继引入了硬件1和硬件2.0(这一决策在2016年埃隆·马斯克于Autopilot 2.0电话会议中的阐述中得到了详细说明)。
在早期阶段,特斯拉的软件工程师们致力于通过手写代码来攻克自动驾驶的难题,初期成果主要体现在优化高速公路自动驾驶场景上,因为相较于复杂的城市街道环境,高速公路场景较为简单明了。
而这一策略使得Autopilot在人工监督下,于高速公路上的表现日益成熟,逐渐形成了专为高速公路设计的软件体系。与此同时,特斯拉也在默默耕耘城市街道自动驾驶的难题,但这一阶段的Autopilot软件并未立即面向公众开放,直到早期FSD Beta版本的推出,才标志着这一技术的初步亮相。
随着软件版本的持续迭代和车辆硬件的不断升级,特斯拉的Autopilot系统逐渐形成了多个软件堆栈并存的局面。为了保持向后兼容性,特斯拉在开发新版本时不得不保留部分遗留代码堆栈。
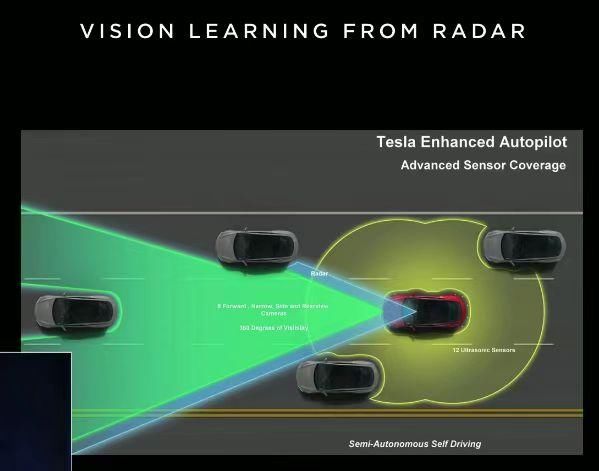
2021年,特斯拉迎来了自动驾驶技术的重要转折点——转向Tesla Vision,由Andrej Karpathy引领的AI团队致力于开发下一代FSD技术。
直到2022年11月FSD Beta V11的发布,特斯拉才实现了高速公路自动驾驶功能的统一(单一)堆栈,摒弃了旧的代码架构。然而,值得注意的是,特斯拉并未立即将城市街道导航功能与高速公路堆栈合并,以实现更为彻底的单栈架构,这一步骤或许预示着未来更为宏大的技术整合蓝图。
写在最后
尽管FSD V12.4.3版本让我们遇到了一些难题,但特斯拉对于即将到来的FSD V12.5版本充满期待,并且正在努力改进,这表明了公司对提升自动驾驶技术的决心。而随着我们转向更加集中的单堆栈设计,并且不断增加新功能,特斯拉的自动驾驶系统在未来将变得更加顺滑和聪明,让开车变得更加轻松愉快。
值得一提的是,有消息称,尽管马斯克最初预计FSD V12.5将于6月底发布,但考虑到FSD 12.4版本的多次推迟和修订,这一时间框架已有所变动。按照当前的发布节奏,FSD V12.5有望在FSD 12.4发布后约4-6周内上市,即可能在8月底左右与公众见面,而如果FSD 12.4.3版本获得广泛好评,这一时间表可能会进一步提前。
那么,你期待吗?
友情提示
本站部分转载文章,皆来自互联网,仅供参考及分享,并不用于任何商业用途;版权归原作者所有,如涉及作品内容、版权和其他问题,请与本网联系,我们将在第一时间删除内容!
联系邮箱:1042463605@qq.com